The Non-Contact AFM (NC AFM), invented in 1987 [1], offers unique advantages over other contemporary scanning probe techniques such as contact AFM and STM. The absence of repulsive forces (presenting in Contact AFM) in NC AFM permits it use in the imaging “soft” samples and, unlike the STM, the NC AFM does not require conducting samples.
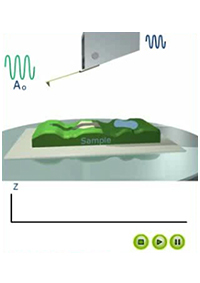
The NC AFM works via the principle “amplitude modulation” detection. The corresponding detection scheme exploits the change in the amplitude, A, of the oscillation of a cantilever due to the interaction of a tip with a sample. To the first order, the working of the NC AFM can be understood in terms of a force-gradient model [1]. According to this model, in the limit of small A, a cantilever approaching a sample undergoes a shift, df, in its natural frequency, fo, towards a new value given by
feff = fo (1-F’(z)/ko )1/2
where feff is the new, effective resonance frequency of the cantilever of nominal stiffness ko in the presence of a force gradient F’(z) due to the sample. The quantity z represents an effective tip-sample separation while
df = feff - fo is typically negative, for the case of attractive forces.
If cantilever is initially forced to vibrate at a fset > fo, then the shift in the resonance spectrum of the cantilever towards lower frequencies will cause a decrease in the oscillation amplitude at fset as the tip approaches the sample [1].
This change in A is used as the input to the NC-AFM feedback. To obtain a NC AFM image the user initially chooses a value Aset as the set-point such that Aset < A(fset) when the cantilever is far away from the sample.
The NC AFM feedback then moves the cantilever closer to the sample until its instantaneous oscillation amplitude, A, drops to Aset at the user-defined driving frequency fset. At this point the sample can be scanned in the x–y plane with the feedback keeping A = Aset = constant in order to obtain a NC AFM image. The NC AFM feedback brings the cantilever closer (on average) to the sample if Aset is decreased at any point, and moves the cantilever farther away from the sample (on average) if Aset is increased. Overall, the implication of the above model is that the NC AFM image may be considered, in the limit of small A, to be a map of constant interaction-force gradient experienced by the tip due to the sample.
The non-contact mode has the advantage that the tip never makes contact with the sample and therefore cannot disturb or destroy the sample. This is particularly important in biological applications.
References
J. Appl. Phys. 61, 4723 (1987).